Инструкция по установке макроса
✕
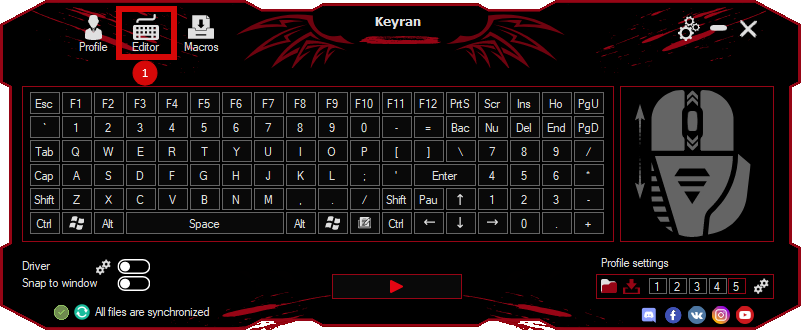
Скачиваем и устанавливаем программу Keyran. Переходим в редактор макросов.
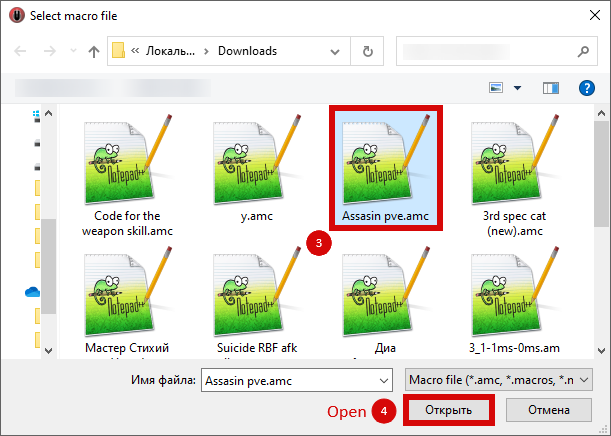
Нажимаем кнопку «Открыть файл» и выбираем скачанный файл.

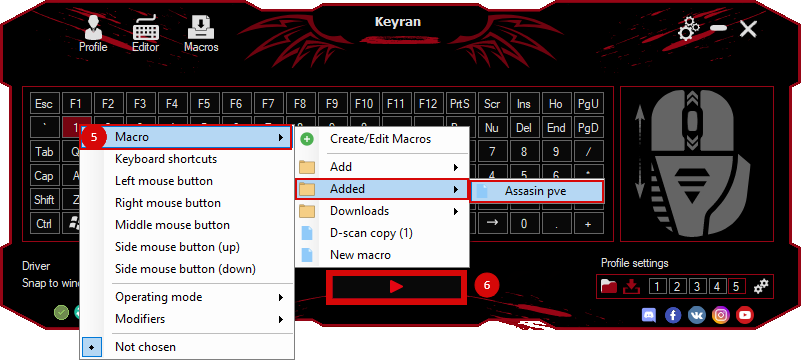
Присваиваем макрос на клавишу и запускаем программу.