Instructions for installing a macro
✕
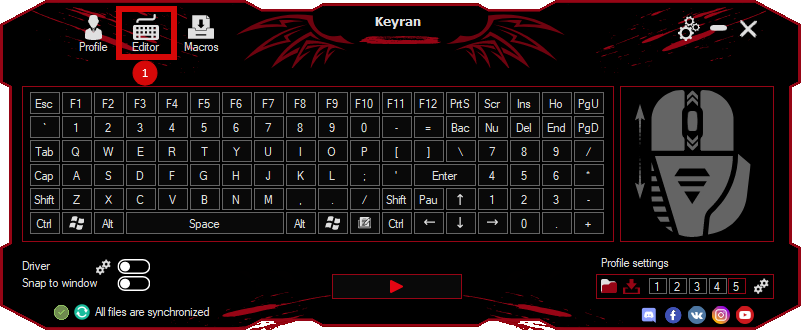
Download and install the Keyran program. Let's go to the macro editor.
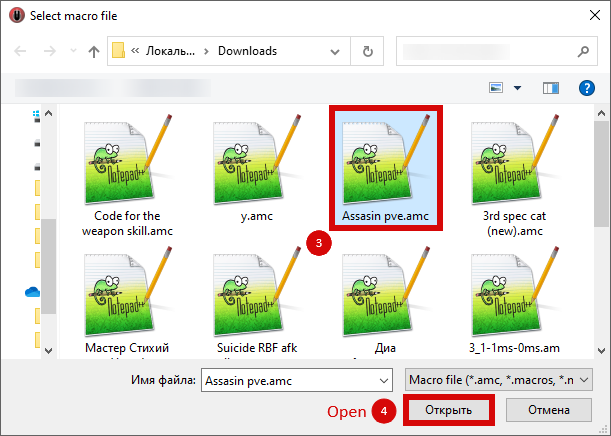
Click the «Open File» button and select the downloaded file.

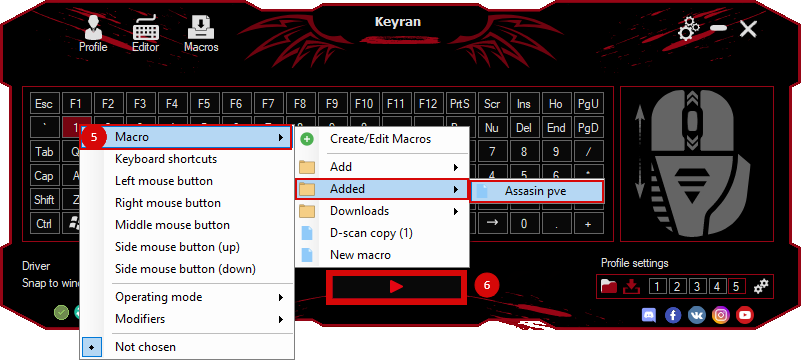
Assign a macro to a key and run the program.